
Testing Flex sensor position in glove
Possible position 1:

What we went with:

Putting the sensor on the inside of palm was prohibitive:
Flex Wire Wrapping
We used flex wire wrapping techniques (excellent video by Tom Igoe here.
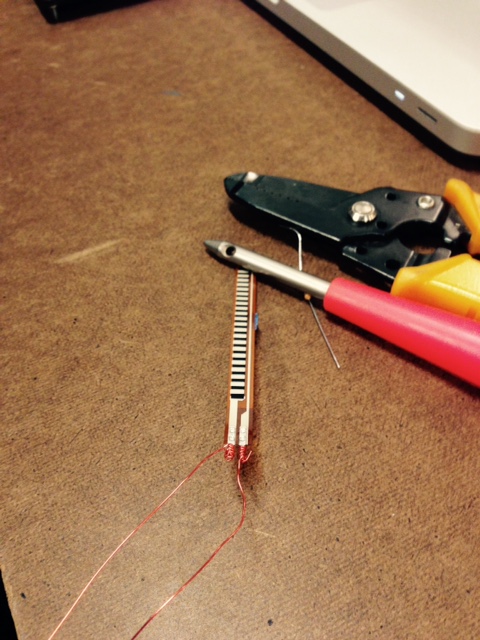
The process was VERY annoying and tedious:
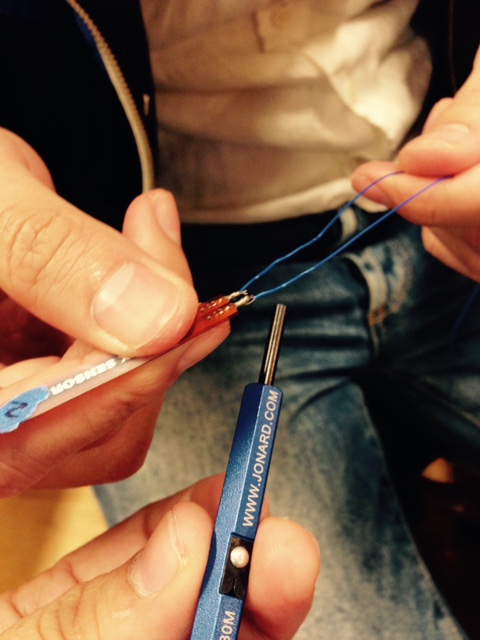
Yuchi demonstrating the way we did it:
We twisted the wire using a technique on pComps blog
Getting to know our sensors
Now we start testing sensor values received in our laptop, they are very rough (so we map them for accuracy)
Then we wrote p5 code to take sensor values and project images on p5. Success! BUT these are just any images coming on to any value. Not mapped.
Now we map values for combinations between sensor A & sensor B so the glove can recognize shapes (scissor, paper and rock)
Then, we add switching so that moving from one shape (scissor) to another (to say rock), that displays too
We worked on a timer and game mechanics to work with our glove,
Continously improving accuracy of the sensor as it has been changing quite alot:
And eventually it worked.
Thank you ladies and gentleman. Credits: Tom Igoe for teaching us this everything to build our first power glove game and Laura Chen for unsticking us when we were getting stuck.